Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




Flight in conditions of steep descent presents particular dangers for helicopters. It is generally avoided by pilots but the continuing occurrence of accidents and incidents in this flight regime indicates that it is both operationally useful (e. g., positioning underslung loads) and easy to encroach inadvertently. In Chapter 5 we saw that the response to collective pitch at steep angles of descent can reverse, and so increased collective is required to descend more rapidly. Under controlled or directed conditions, this feature can be contained by a pilot, but in other conditions it can easily give rise to serious handling deficiencies. In Chapters 4 and 5 we discussed the problem of power settling, when the flight path steepens in response to an increase in collective. In Ref. 6.64 Heyson presents a useful theoretical analysis of the problem; the reader is referred to Fig. 4.12 where the power requirements in steep descent are illustrated. Heyson also comments on the operational implications of power settling – to quote from Ref. 6.64.
Operationally, the appearance of the phenomenon is rapid and usually unexpected. Pilots sometimes refer to it as ‘stepping in the sinkhole’. The particular problem is that the pilot has no means of determining his aerodynamic flightpath. He may successfully negotiate a combination of geometric glide slope and speed so many times that he is confident of its safety; however, the next approach may encounter winds that produce disastrous consequences.
A similar sequence of events can be encountered even without a tailwind. If any disturbance increases the speed along the glide slope, the instinctive reaction of a pilot is to correct the airspeed by pulling back on the cyclic-pitch stick to increase the rotor inclination. If the original stabilised glide slope was near a minimum power condition, comparison of the various parts of Fig. 12 shows that such a rearward stick movement may result in a power requirement far in excess of that available in the helicopter.
The operational significance of this effect is that pilots should be specifically cautioned against any large or rapid rearward stick motions while in steep descents.
Any recovery from power settling is likely to result in a significant loss in altitude. Thus, the safest procedure is to fly so as to avoid power settling at all times.
Power settling and the associated nonlinear flight path response to controls occurs in steep descent ( >60°) in the speed range of about one to two times the hover induced velocity (20-50 knots, depending on rotor disc loading). At much lower rates of descent and in near-vertical descent, a helicopter can enter a potentially hazardous flight state where high rates of descent can build up rapidly and erratic pitch androll oscillations can develop. In addition, control effectiveness can change markedly, particularly collective control, with normal recovery techniques seeming only to exacerbate the situation. Analogous to the stall in fixed-wing aircraft, at least in terms of the consequences to the flight path trajectory, but quite dissimilar in aerodynamic origin, this so-called vortex-ring condition is definitely a state to avoid, especially at low altitude. Flying
qualities in vortex ring become severely degraded and a pilot’s first consideration should be to fly out of the condition.
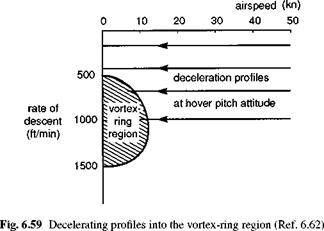
The phenomenon has its origin in the peculiar flow characteristics that develop through the rotor in the intermediate range between the helicopter and windmill working states (see Fig. 2.8). At very low flight speeds (< 15 knots) and rates of descent between 500 and 1500 ft/min, depending on the rotor disc. loading, the flow becomes entrained in a toroidal-shaped vortex ring that leads to extensive recirculation in the outer regions of the rotor disc. The vortex ring is very sensitive to small changes in flow direction, and rapid fluctuating asymmetric development of the ring can lead to fierce moments being applied to the fuselage.
The standard recovery technique involves lowering the nose of the aircraft until sufficient speed is gained that the vortex is ‘washed’ away, and then applying collective pitch to cancel the rate of descent. Different aircraft types have their own peculiar characteristics in the vortex-ring state. Early tests conducted at the RAE (Ref. 6.73) produced results that varied from loss of control to mild wallowing instability. In general, the aircrew manual for a type will contain an entry describing any particular features and advising the best recovery procedures. One such manual notes that rates of descent can build up to 6000 ft/min if vortex ring becomes fully established and that ‘the aircraft pitches sharply nose down if rearward flight is attained’. Another refers to ‘an uncontrollable yaw in either direction’ eventually occurring. This same manual adds that ‘any increase in collective pitch during established vortex ring state creates a marked pitching moment and should be avoided’. All such references make it clear that considerable height will be lost if the vortex-ring state is allowed to develop fully before recovery action is taken.
Interest in the effectiveness of collective control during recovery prompted a series of trials being carried out by the author at RAE Bedford using Wessex 2 and Puma helicopters. The tests were qualitative in nature and aimed at exploring the behaviour of these two aircraft in the vortex-ring state and establishing the benefits to recovery profile of increasing collective pitch before the aircraft nose is lowered to gain air-speed. The test technique options for approaching the vortex-ring condition were somewhat constrained by the need to operate well above the ground (minimum height for initiating recovery action, 3000 ft above ground level) and the lack of reliable low airspeed measurement on both aircraft. The procedure adopted involved a deceleration from 50 knots to the hover, maintaining a constant pre-established (hover) attitude and rate of descent. The rate of descent was then increased incrementally until the vortex region was encountered (Fig. 6.59). For both test aircraft the vortex region was quite difficult to find and apparently limited to a range of very low airspeed. With the Wessex, the region was first encountered with the entry profile at 800 ft/min rate of descent. To quote from the pilot’s report (Ref. 6.62)
… with the rate of descent at about 800ft/min we settled into the vortex ring; the rate of descent increased through 2000ft/min in spite of increasing power to 3000ft lb (hover torque reading). The vibration level was marked and a considerable amount of control activity was required to hold the attitude, though the cyclic controls always responded normally. Applying full power produced a rapid reduction of the rate of descent as soon as the rotor moved into clear air.
|
|
first and then increased when airspeed developed, the height loss was about 500 ft. Similar results were found with the Puma, except that the pitching and rolling moments were of higher amplitude and frequency and became more intense as the collective lever was raised during recovery. It is emphasized here that the results discussed above are particular to type, and the beneficial use of collective during recovery may not read across to other aircraft. The difference in height loss during recovery for the two techniques is, however, quite marked and is operationally significant, particularly for low-level sorties. Vortex ring is a real hazard area and can be encountered in a variety of situations, some less obvious than near-vertical descents into restricted landing areas. If a pilot misjudges the wind direction, for example, and inadvertently turns and descends downwind into a landing area, concentrating perhaps more on ground speed than airspeed, then he may fly dangerously close to the vortex-ring condition. The final stages of a quick stop manoeuvre can also take the rotor through the vortex-ring condition as the pilot pulls in power. Such manoeuvres are typically carried out close to the ground and the consequences of a delayed or inappropriate recovery procedure could be serious.
Specific flying qualities criteria for the response characteristics in flight at steep descent angles do not exist, but perhaps the emphasis should be on deriving methods to assist the pilot in respecting the very real limits to safe flight that exist in this flight regime, conferring carefree handling, a topic returned to in Chapter 7.
In the field of fixed-wing aircraft flying qualities, the subject of flight path response has received considerable attention and remains one of the areas of ongoing research and even controversy (Ref. 6.23). Two reasons explain why this level of interest has not carried over to rotary-wing aircraft handling. First, a critical flight phase and MTE for fixed-wing aircraft is the approach and precision flare and landing. The flight path response during the flare is very different for classical aircraft than for highly augmented
|
Fig. 6.56 ADS-33C requirements on displayed torque in terms of overshoot rates and time to first peak (Ref. 6.5) |
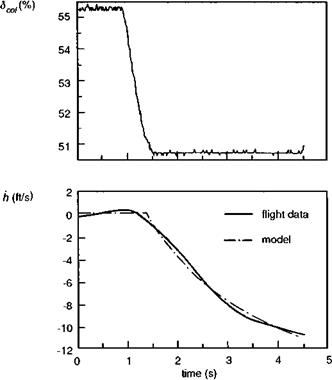
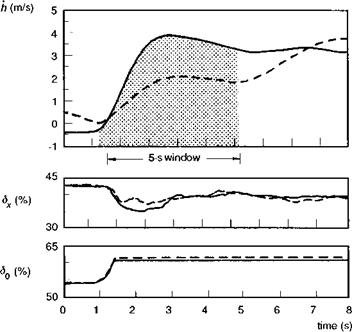
aircraft, and different criteria are required for each, accommodating both attitude and path angle bandwidth requirements. For helicopters, there is no real equivalent MTE, for while guided approaches are common, by the time the helicopter is close to touchdown, the speed will have been reduced to the point that pitch and flight path are independent degrees of freedom. Second, through collective pitch, the helicopter pilot has direct lift or direct flight path control, and can normally use a combination of collective and cyclic to achieve a combination of pitch and flight path angle in forward flight to suit the mission requirements. These two reasons go some way towards explaining why the same level of attention has not been given to rotorcraft; the problems are not the same and the low-speed criteria for rotorcraft are more important. In the absence of a substantial test database, ADS-33 proposed an identical criterion to the one derived for hover and low-speed flight, based on an equivalent first-order system response. In the years since ADS-33 was published, several attempts at using this format have been published. For unaugmented aircraft, the important coupling parameter between pitch and incidence motion is the static stability derivative Mw. For aircraft with close to neutral stability, the pitch and heave motions are uncoupled in the short term and the flight path has a distinct first-order shape. An example of this case is presented for the AH-64A at 130 knots in Ref. 6.72; the time domain fit is shown in Fig. 6.57 and the handling parameters estimated from the first-order fit compare well with stability and control derivatives estimated from test data using six degrees of freedom models. Much poorer results are presented in Refs 6.19 and 6.71. In Ref. 6.19, the corresponding results for the Bo105 at 80 knots are presented. Figure 6.58 shows the height rate response to a step collective input, indicating a non-first-order-like shape in the 5-s window. For the Bo105, the pitch response to a collective step is very strong, causing the speed to reduce and the aircraft flight path to change as the nose pitches up. Applying cyclic to minimize pitch excursions resulted in a first-order height rate response (see full
|
Fig. 6.57 Fit of handling qualities model to step collective response – AH-64 (Ref. 6.72) |
|
|
curve on Fig. 6.58), but the estimated parameters were dependent on the cyclic control strategy. The Bo105 results show clearly that the simple first-order equivalent system is not a consistently good approximation to heave dynamics and needs to be applied with considerable caution. Heave axis handling qualities in forward flight is an area clearly needing more attention.
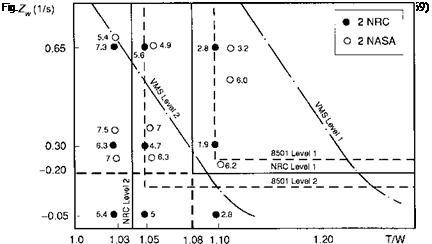
The work reported in Refs 6.65 and 6.66 generally supported the use of VSTOL aircraft formats and an early version of the revision to MIL-H-8501 placed the boundaries on time domain parameters – rise time, response shape and control sensitivity, based on the height rate response to a step collective input. The lower boundary for Level 1/2 handling corresponded to a vertical damping Zw of -0.25 / s centred around a collective sensitivity of 0.4 g/in. Later tests conducted on the NASA VMS (Ref. 6.68) and at the Canadian Flight Research Laboratories (Ref. 6.69) demonstrated the importance of thrust to weight (T/W). A new format, based on T/W, was proposed with revised heave damping boundaries (Fig. 6.54). The Canadian trials provided a range of new insights into rotorcraft vertical axis handling. First, for the bob-up task, the required heave damping for Level 1 handling qualities appeared to be independent of T/W down to the boundary at 1.08 (i. e., 8% thrust margin), provided that the damping was above the minimum required value of 0.25; Level 2 handling could be achieved with thrust margins greater than 4%, for any value of damping, down to zero. Second, the response shape criteria discussed earlier appeared to have little significance in determining Level 1
handling qualities for low values of T/W typical of rotorcraft loaded to their mission gross weights. Third, the dynamics of the torque response, and particularly the dynamic response of the cockpit-displayed torque, significantly affected pilot control strategy and hence handling qualities, emphasizing the need for criteria relating to this effect. Fourth, pilots preferred a collective control sensitivity linearly matched to the heave damping such that the ratio was a constant. Fifth, the boundaries on the damping/thrust margin charts, suggested by the earlier NASA VMS trials (Ref. 6.66), actually sloped a different way; the results from NRC flight trials suggested that as the damping increased, the thrust margin should at least be held constant and possibly increase, to give the pilot a similar level of climb performance. There is a definite trade-off involved here – performance versus stability – and the flight data favours the former, at least for the bob-up task. Reference 6.69 argues that in ground-based simulation experiments, pilots have greater difficulty with the stabilization task than in real flight due to deficient visual cues, hence biasing their preference towards greater stability. Finally, the level of augmentation in pitch and roll had a significant effect on the workload capacity available for pilots to concentrate on the primary vertical axis task. These results fed into the development of the US Army’s military handling requirements, and a major revision to the height response criteria eventually appeared in ADS-33 (Ref. 6.5).
The current requirements on vertical axis response characteristics in Ref. 6.5 are based on the premise that the height rate response to a collective step input should have a qualitative first-order shape as shown in Fig. 6.55. Handling qualities parameters can be derived from a response model structure in the first-order form
![]()
 |
h _ Ke W
Sc Th s + 1
heq
where h is the height, Sc the pilot’s collective lever and the estimated (time domain) handling qualities parameters should have values less than those given in Table 6.4.
|
|
|
Table 6.4 Maximum values for time parameters in height response to collective (Ref. 6.5)
|
The maximum acceptable value of the time constant Tjeq for Level 1 handling corresponds to a minimum value of heave damping of -0.2. The time delay is included in the model structure to account for actuation and rotor dynamic lags. The gain or control power K is determined from the steady-state response to the step input and, for the simple first-order representation, is given by the ratio of control sensitivity to damping. In ADS-33, the limits on vertical axis control power are expressed in terms of the achievable height rate in 1.5 s and are given in Table 6.5.
The requirements of Table 6.5 can be interpreted in terms of required hover thrust margins if it is assumed that the initial 1.5 s of height response takes the form of a first-order exponential function. The Level 1 requirements then correspond to a thrust margin of 5.5% while the Level 2 boundary lies at 1.9% at zero damping; both values are far lower than any previous results obtained in clinical flying qualities tests with the bob-up task. In this requirement we see a degree of conflict between current capabilities and future requirements. Most helicopters, whether civil or military, will carry the maximum allowed payload on a mission, and this generally leaves little margin for manoeuvring at low speed. As fuel burns off, the available excess thrust and power margins increase, but to insist on 8%, 10% or even higher margins at take-off can significantly reduce the payload and hence mission effectiveness from a productivity perspective. Thus, a compromise has been made in the performance requirements of vertical axis handling, in recognition of current operational practices. For increasing heave damping, the T/W has to increase to achieve the same vertical velocity, and the control power requirements of Table 6.5 can be interpreted as boundaries on Fig. 6.54. The lines again indicate the apparent preference for performance, rather than stability,
|
Table 6.5 Vertical axis minimum control power requirements (Ref. 6.5)
|
in MTEs like the bob-up. In contrast, preliminary results from DRA piloted simulation trials of ship landings in poor weather (Ref. 6.70) indicate that increased stability (damping) is preferred as T/W is reduced. The tentative results published in Ref. 6.70 suggest that in sea state 5 (typical worst operating conditions with deck motion ±2 m) a heave damping of -0.4 would be required with a T/W of 1.08.
The handling parameters in eqn 6.29 can be derived from a curve-fitting procedure defined in Ref. 6.5 and summarized below. This is the only criterion in ADS-33 that requires explicit parameter estimation from a model-fitting process. The technique and some examples have already been discussed in Chapter 5 of this book. In the present case the fitting process is classed as least squares, output error and is accomplished as follows:
(1) The helicopter is trimmed in hover and a step input in collective applied; measurements of height rate are obtained at 0.05-s intervals for a 5-s duration.
(2)
Setting initial values for the parameters in eqn 6.29, based on a priori knowledge, an estimate of the height rate is obtained from the solution to eqn 6.29
![]() hest — 0, t <t
hest — 0, t <t
The t > T requirement in eqn 6.30 is made to ensure that the response is causal, a point noted in Ref. 6.71.
(3) The difference between the flight measurement and the estimated height rate is constructed as an error function e(t) given by
101
®2 — D (hi — hi2 (6.32)
i—1
and the sum of squares of this error function is minimized by varying the parameter set K, Th and Th.
’ heq heq
|
E101 /. —2 i—1 (h i — h) where the mean value of measured height rate is given by – E101 hn h= ^i—1 |
(4)
 |
|
The goodness or quality of fit can be derived from the coefficient of determination given by
(5) For a satisfactory fit, the coefficient of determination should exceed 0.97 and be less than 1.03.
The LOES for low-speed heave axis handling qualities described above has evolved from a number of attempts to model important handling effects during the development
of ADS-33. It appears to capture, with a reasonably high degree of fidelity, the natural characteristics of unaugmented helicopter heave motion in the frequency range of pilot closed-loop control in manoeuvres like the bob-up and precision landing.
One final aspect of the response to collective concerns the shape of the normal acceleration following a very sharp control input. This subject was discussed in Chapter 5 and is also given some attention in Ref. 6.67. The delay in the build up of the rotor inflow causes the acceleration response to peak at much higher values than the ‘steady state’ (see Fig. 6.52). This ‘high order’ effect will be reflected in the height rate response and will ‘spoil’ the simple first-order character, with the potential consequence that the model parameters will be distorted, in trying to match the more complex response shape. One solution to this potential difficulty is to ensure that the pilot applies a ramp collective input over, say, a 1-s period, thus allowing the inflow time to develop during the input. This is an expedient measure to satisfy the low-moderate frequency requirements of the handling effects accommodated by eqn 6.29, but obscures any additional handling effects at higher pilot gains. We have already stated that control of vertical motion is largely a low-moderate gain task for the pilot, but automatic height-keeping controllers will typically have to work at much higher frequencies where the simple model structure given above will be inadequate. Raising this issue here highlights the different modelling requirements for handling qualities and control law design, a topic given some attention in Chapter 5 of this book.
6.5.1 Criteria for torque and rotorspeed during vertical axis manoeuvres
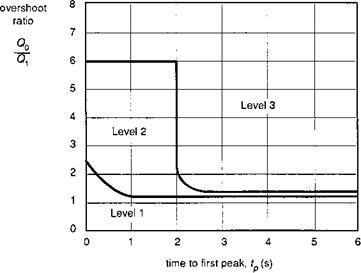
The vertical handling qualities research exercises at NASA Ames and the Canadian FRL, described in Refs 6.67 and 6.69, both highlighted the importance of monitoring rotor rpm and torque during MTEs like the bob-up. In some cases the monitoring requirements on the pilot dominated the workload and hence the pilot HQRs. This was particularly true for configurations with low T/W or with slow engine/rotorspeed governor systems leading to large excursions in rotorspeed. Various attempts were made to develop supplementary criteria relating to the response of these variables, but the findings from the available database were not entirely consistent. The eventual formats that were settled on for ADS-33 were of a qualitative form for rotorspeed governing, requiring transients to remain within limits for all tasks flown within the OFE, and a quantitative form for displayed torque as shown in Fig. 6.56. The Level 1/2 and 2/3 boundaries are based on the character of the displayed torque in terms of time to first peak and overshoot ratio. To the author’s knowledge, there are very few data in the open literature to validate the criterion set down in Fig. 6.56, and the topic has to be one of the weak areas of current handling criteria and, in view of its importance to pilot workload, in need of further research.
Heave, or vertical, axis handling qualities criteria are concerned principally with the response of the aircraft to collective pitch application. In hover and low-speed flight, collective provides the pilot with direct lift control, a feature that clearly makes the helicopter almost unique. In forward flight, control of the aircraft’s flight path can be achieved through a combination of collective and cyclic, but in this section we shall restrict the discussion to the response to collective control. The extent to which the pilot is able to exercise this degree of freedom depends on a number of factors, which we shall discuss, but is often dominated by the thrust margin available before transmission torque, rotorspeed or engine limits are exceeded. The thrust margin is a strong function of airspeed through the variation of the power required in trimmed flight; this point has been discussed earlier in the modelling chapters of this book, but it is worth recalling the shape of the power required curve given in Fig. 4.11. Typically, for a fully laden helicopter at its mission weight, the power margin at hover is very low, of the order of 5-10%, giving thrust margins between 3 and 7%. At minimum power speed, the same helicopter may have more than a 100% thrust margin, enabling the aircraft to sustain a 2 g turn. Other fundamental response parameters are the heave damping and control sensitivity derivatives. Again, both vary significantly with forward speed. These aerodynamic effects are a reflection of the increasing efficiency of the rotor as a lifting device through to the mid-speed range. As speed is further increased, the power required increases again and the response derivatives level off to their maximum values as the aerodynamic lift becomes dissipated in higher harmonic loadings that contribute nothing to flight path response. Unlike roll response characteristics, the heave dynamic characteristics therefore vary significantly with forward speed. The pilot is able to exploit these varying characteristics in different ways, and we must expect the associated handling criteria to reflect this.
hover points 9ate
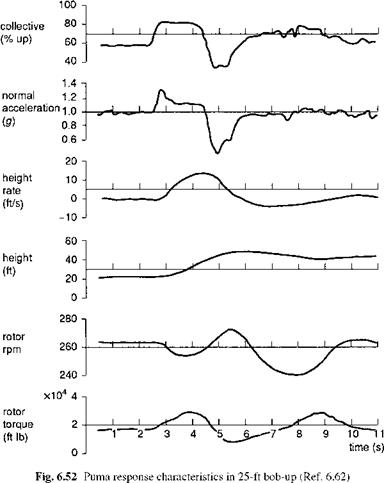
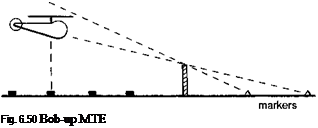 The low-speed vertical axis response characteristics are highlighted in the bob-up task, a vertical unmask manoeuvre illustrated in Fig. 6.50. Results from DRA tests with the research Puma are shown in Figs. 6.51 and 6.52; the pilot’s task was to climb with maximum power from the low hover position and to re-establish a hover when the ground markers were lined up with the top of the gate (Ref. 6.65). Height responses are shown in Fig. 6.51 for bob-up heights from 25 to 80 ft together with the case of a maximum power vertical climb, when the climb rate exceeded 30 ft/s (10 m/s). In comparison, the maximum rate achieved during the 25-ft bob-up was only 14 ft/s. This result is a function of the vertical damping of the rotor, which gives an effective time
The low-speed vertical axis response characteristics are highlighted in the bob-up task, a vertical unmask manoeuvre illustrated in Fig. 6.50. Results from DRA tests with the research Puma are shown in Figs. 6.51 and 6.52; the pilot’s task was to climb with maximum power from the low hover position and to re-establish a hover when the ground markers were lined up with the top of the gate (Ref. 6.65). Height responses are shown in Fig. 6.51 for bob-up heights from 25 to 80 ft together with the case of a maximum power vertical climb, when the climb rate exceeded 30 ft/s (10 m/s). In comparison, the maximum rate achieved during the 25-ft bob-up was only 14 ft/s. This result is a function of the vertical damping of the rotor, which gives an effective time
time (s)
|
|
constant of several seconds, together with the constraint on the pilot to respect the Puma’s collective pitch limits. Figure 6.52 shows the variation with time of selected variables during a 25-ft (7.5 m) bob-up. Thepilotpulls in a 20% collective input, causing a sharp rise in normal acceleration. The overshoot in the time history of normal g is explained by the delay in build up of the induced inflow, described in Chapters 3 and 5. A thrust margin of about 15% is sustained for about 1 s before the pilot lowers the collective by more than 40% and almost immediately pulls in power again to arrest the deceleration and level out at the top of the bob-up. The manoeuvre is relatively simple but has required the pilot to apply large control inputs in three phases. The lower traces in Fig. 6.52 show the excursions of rotor rpm and torque. The lower rotor rpm limit of 240 rpm is actually reached during the settling phase at the top of the bob-up. The need to respect rotor collective, torque and rpm limits plays a significant role in pilot subjective opinion of vertical axis handling qualities. This has been exposed in most of the flight and ground-based simulation work supporting the development of associated criteria, and we shall return to this aspect later in this section and in Chapter 7.
|
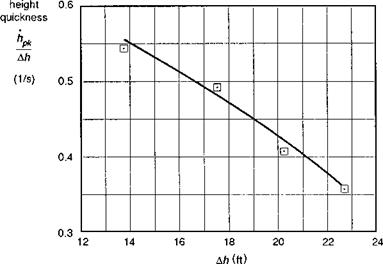
Fig. 6.53 Puma height quickness in bob-up task |
Height quickness results derived from the Puma tests are shown in Fig. 6.53 and highlight the much lower values than those found for attitude response, even though the bob-up has been quickened by the pilot through the application of a collective doublet. Control of helicopter vertical motion is generally regarded as a relatively low-gain task for pilots, and criteria developments have been limited to fairly simple formats that apply across the frequency range. The RAE Puma tests referred to above were one of a series conducted during the early – to mid-1980s to develop new heave handling criteria for rotorcraft (Refs 6.65-6.68), building on previous work applied to VSTOL aircraft, with particular emphasis on hover and low speed. Flight path control in forward flight will be discussed later in this section.
For low speed and hover MTEs, criteria for moderate and large amplitude pitch axis handling qualities mirror the roll axis very closely. The pilot’s ability to manoeuvre is determined by the same performance or agility parameters – control power and attitude quickness. Figure 6.39 illustrates flight results from the DRA research Lynx (Ref. 6.45) performing a quickhop MTE; the aircraft is repositioned from one hover
|
|
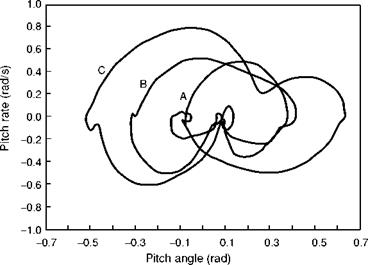
A – initial Ав = 11.5°
B – initial Ав = 21.8°
C – initial Ав = 31.5°
Fig. 6.39 Phase plane portraits for Lynx quickhop manoeuvres (Ref. 6.45)
position to another, across a 50-m (150 ft) clearing. The results are displayed as a phase plane portrait with pitch rate plotted against attitude for three different levels of pilot aggressiveness – low, moderate and high, defined by the initial pitch angle and the rate of application of cyclic control. At the highest level of aggressiveness, the pilot is nominally attempting to fly the manoeuvre as quickly as possible, achieving pitch angles of over 30° during the acceleration phase and corresponding rates of 40o/s. Pitch rates of 50°/s were used in the reversal phase of the manoeuvre to initiate the deceleration. In many respects the quickhop is similar to the lateral sidestep described earlier and illustrated in Fig. 6.19. Moreover, in hover, the control power in the pitch axis is essentially the same as in the roll axis, scaled by the ratio of control ranges. This can mean that the pitch axis control power is actually higher than the corresponding roll axis control power. However, there are two handling aspects that serve to differentiate between pitch and roll requirements for control power and quickness. First, the field – of-view constraints resulting from large positive and negative pitch excursions tend to make pilots less willing to use the full agility in the pitch axis. This is coupled with pilot concern of where the tail of the aircraft is; during the quickhop reversal at maximum aggression, for example, the Lynx’s tail rotor descends 10 m (30 ft) closer to the ground. While the same is true for the blade tips in the sidestep, the pilot can more easily monitor the aircraft’s safety as he or she looks into the manoeuvre. Second, to achieve similar quickness levels in pitch and roll, the pilot needs to apply larger control inputs to quicken the pitch response effectively, since the higher inertia in the pitch axis reduces the achievable angular acceleration and hence bandwidth, for the same applied control moments. This can lead to overcontrolling and reduced safety margins
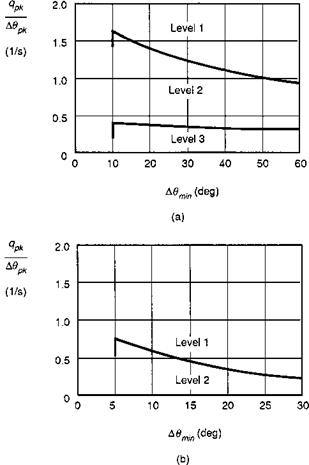
when manoeuvring close to the ground. The result of these effects is that requirements for pitch axis control power and quickness tend to be lower than for roll. Figures 6.40 and 6.41 show the ADS-33 minimum control power and quickness required for rate response types, for the different classes of MTE. Unlike the roll axis criteria shown in Figs 6.15 and 6.17, the pitch criteria are defined only for hover/low-speed MTEs. In forward flight MTEs, ADS-33 is much more qualitative, requiring the pitch authority to be sufficient to accelerate between defined speeds at constant altitude, with no levels of aggressiveness defined.
The minimum control power levels in Fig. 6.40 were developed from flight and simulation experiments conducted on ground-based and in-flight simulators and apply to the cases of aircraft manoeuvring from the hover at the most critical wind state for pitch manoeuvring. They represent the minimum manoeuvre margins for successfully accomplishing battlefield helicopter operations. For moderate amplitude manouevres, the quickness minima in Fig. 6.41 apply. Compared with the roll boundaries, we immediately see the levels are reduced across the range by significant amounts, for the reasons given above. While the rationale for the mismatch between pitch and roll requirements is understandable, when these are realized in practice, the pilot does not have fully harmonized cyclic control; if he or she pushes the cyclic 45° to the right, the aircraft might accelerate away at 70°, simply because the roll quickness is higher than the pitch. The author believes that there is a strong case for full harmonization with rate or attitude response types for low-speed MTEs, as would be found, for example, with TRC (see Section 6.8).
The use of quickness and response to large control inputs to quantify attitude flying qualities at moderate to large amplitude is an innovation of ADS-33 and replaces the earlier measures adopted in MIL-H-8501A and the UK’s Def Stan, based on the attitude response in a defined time, independent of response type. Earlier versions of the ADS, in the original draft Mil Spec 8501B version, did adopt the ‘attitude change in one second’ criterion, but the very compelling and more intuitive quickness, which
|
Fig. 6.41 Pitch attitude quickness criteria (Ref. 6.5): (a) target acquisition and tracking (pitch); (b) general MTEs (pitch) |
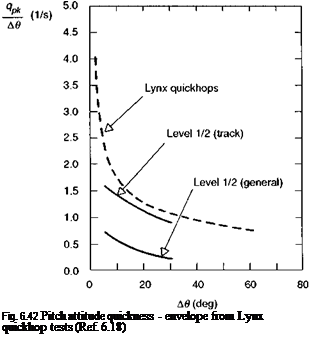
had emerged as a natural roll axis handling and agility parameter, soon replaced this for moderate pitch attitude manoeuvres, with excursions between 10° and 30°.
Figure 6.42 shows the Lynx quickness envelope from the DRA Quickhop tests, overlaid with the ADS-33 Level 1/2 boundaries for tracking and general MTEs. The attitude change has been extended out to beyond 60° to include the excursions during the pitch reversal. The quickness, corresponding to the ADS-33 minimum control power requirement at this end of the manoeuvre range, would be about 0.5 rad/s, or approximately half that achieved by the Lynx. A similar result was found with the roll axis sidesteps. The Lynx is a very agile airframe of course, empowered by its hingeless rotor and it does raise the question as to what are the desirable levels, rather than the minimum levels, of quickness for different MTEs. We shall return to this subject under the special topic of agility in Chapter 7. At the lower end of the amplitude range in Fig. 6.42 the measured quickness values rise up to well beyond the minimum requirements; here we are in the domain of the tracking phase of the MTE and we have to look again to the bandwidth criterion to set the standards.
6.4.1
 |
Small amplitude/moderate to high frequency: bandwidth
In the development of pitch handling qualities for fixed-wing aircraft (Ref. 6.6) there has been a history of controversy over the most suitable format for the primary criteria. Most unaugmented or partially augmented aircraft have a characteristic short period pitch mode that dominates the short-term response to elevator, with a frequency that increases with airspeed. The natural parameters associated with this mode are its frequency and damping (f and m), and the response is also shaped by the zero in the numerator (др) of the pitch attitude (0) to elevator (n) transfer function given by
The exponential function has been added to account for any unmodelled time delays or high frequency lags in the aircraft, e. g., actuators with time constant т. Fixed-wing aircraft short-term pitch handling qualities can be established on the basis of the parameter set in the model structure for the short-period mode given above. As discussed in Ref. 6.59, the parameters are used to derive the control anticipation parameter, which is the fundamental manoeuvre margin parameter for fixed-wing aircraft. This so-called LOES approach (Ref. 6.60), whereby the parameters are derived from a model matched to frequency response flight test data, currently enjoys the role of primary criterion for classical response types or essentially where the fit error is small, implying second- order dynamic characteristics. For conventional fixed-wing aircraft, without stability and control augmentation in the pitch axis, the phugoid mode is normally well separated from the short period in frequency terms and the approximation has a wide range
of application. For non-classical response types, or when the fit error is too large to trust the estimated frequency and damping, one of the proposed alternate criteria is bandwidth. The bandwidth and phase delay parameter pair were, in fact, born out of the difficulties encountered in achieving satisfactory equivalent system matching for fixed-wing aircraft with complex, high-order control systems that completely changed the shape of the frequency response and replaced the classical short-period mode with a combination of others.
A discussion of the bandwidth concept formed part of the treatment of roll axis handling qualities in the previous section and this reads across directly to the pitch axis, where for helicopters, bandwidth is no longer the alternate, but primary parameter. Indeed, the need for an alternate to LOES for pitch axis handling of helicopters is even stronger, with typical phugoid and short-period modes much closer together in the frequency range. Research results presented by Houston and Horton (Ref. 6.28) showed that second-order equivalent systems for pitch-heave dynamics in forward flight do have potential, and can be used to simulate the response to limited bandwidth inputs, although not all of the estimated handling parameters reported were physically plausible. The character of the longitudinal modes was discussed in Chapter 4 along with the theoretical framework for linearized models of pitch dynamics.
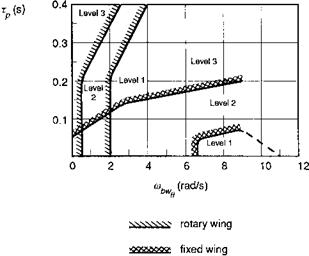
Comparison of the bandwidth/phase delay handling qualities boundaries for fixed – and rotary-wing aircraft are shown in Figs 6.43 and 6.44. Figure 6.43 compares the boundaries for air combat and hover/low-speed tracking tasks, while Fig. 6.44 compares the boundaries for more general rotorcraft MTEs with fixed-wing aircraft in Category C flight phases, including landing. Two points are immediately apparent. The first is that the fixed-wing Level 1/2 boundaries are typically set at bandwidths two to four times those for helicopters. Second, that the phase delay boundaries are set much lower for fixed-wing aircraft. Both of these differences serve to reflect the different character of the rotary – and fixed-wing aircraft MTEs, which in turn is a reflection
|
Fig. 6.43 Pitch attitude bandwidth boundaries – comparison of rotary – and fixed-wing aircraft (Category A flight phases) for air combat and tracking tasks (Refs 6.5, 6.6) |
|
0.2 |
|
0.1 |
of the different speed ranges over which the aircraft operate. It is no coincidence that fixed-wing air combat typically takes place at speeds three to four times those envisaged for rotary-wing aircraft with similar differences in target closure range and rate. Not only is the higher bandwidth required to enable the pilot to track effectively, but the higher speeds in fixed-wing combat provide the aerodynamic forces to achieve the higher bandwidth. It would be very difficult, if not impossible, to engineer the 6 rad/s capability in rotorcraft manoeuvring at 100 knots. The much greater allowed phase delay for rotorcraft is still somewhat controversial, for similar reasons to those discussed for the roll axis. Some research findings have indicated (Refs 6.45, 6.51) that capping of the phase delay boundary down to 200 ms, or even lower, is warranted, and the author has supported this view. However, until a more substantial handling qualities database for pitch axis MTEs is available that clearly demonstrates degraded handling or even PIO tendencies for the higher bandwidth/phase delay configurations, the ADS-33 boundaries will probably be preserved. It should be emphasized that to achieve a phase delay of 300 ms with a 4 rad/s bandwidth, the manufacturer would be working very hard and incorporating very unusual features in the design; in fact, it seems a highly unlikely, if not impossible, practical combination. With the application of digital flight controls to helicopters, however, the controversial issue of phase delay limits for pitch axis dynamics may well re-emerge.
6.4.2 Small amplitude/low to moderate frequency: dynamic stability
The lack of natural longitudinal stability in helicopters was highlighted in Chapter 2 as one of the significant differences between fixed – androtary-wing aircraft; this particular aspect was also discussed in some detail in Chapter 4, where approximate theoretical models provided some insight into the physical mechanisms – the pitching moments due to incidence and speed – that cause the unstable behaviour. The unstable mode
|
Level 2 (FW)
|
0.6 -0.4 -0.2 0.2 0.4 0.6
M 1/s)
S / / / rotary-wing handling boundaries (fully attended flight)
——— rotary-wing handling boundaries (divided attention)
Fig. 6.45 Stability of long-period pitch oscillations – comparison of rotary – and fixed-wing
requirements (Refs 6.5, 6.6)
of an unaugmented helicopter is often referred to as the phugoid, for both hover and forward flight, even though the character of the mode is significantly different in the two speed regimes. As discussed in Chapter 4, for some configurations the ‘phugoid’ frequency reduces to zero in high-speed flight and the motion can become so divergent that the main influence is on short-term control response rather than long-term stability per se.
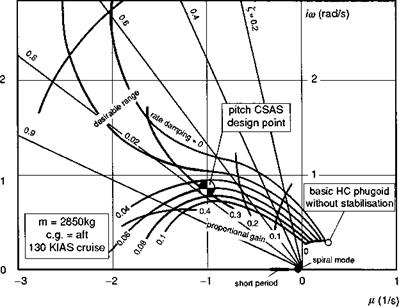
We reproduce Fig. 2.39 here for the reader’s convenience as Fig. 6.45, showing a comparison of fixed – and rotary-wing handling qualities boundaries on the frequency/damping plane for the long-period mode. The rotary-wing requirements are taken from ADS-33 and strictly apply only to RC response types, but criteria in Def Stan 970 and the civil standards are very similar. The dashed boundary, corresponding to a damping ratio of 0.35, applies to cases where the pilot is required to divide his or her attention between tasks and for flight in degraded visual environments. For fully attended operations, a small amount of instability is allowed, but this is curtailed abruptly for frequencies above 0.5 rad/s. An interesting comparison with the fixed-wing boundaries is the presence of the shaded region where a Level 1 rotarywing aircraft handling corresponds to worse than Level 3 handling for a fixed-wing
|
Fig. 6.46 BK117 at 130 knots cruise – influence of pitch rate and attitude feedback gains on phugoid mode (Ref. 6.61) |
aircraft. Also, for frequencies above 0.5 rad/s, there is a large region where Level 1 rotary-wing handling coincides with Level 2 fixed-wing handling. We shall discuss the first of these observations only, which appears to be quite anomalous. It has to be recognized that in the development of new flying qualities requirements, any new criterion should not immediately exclude existing operational aircraft (unless there is very good reason to), and the allowance of the region of instability on Fig. 6.45 conforms with this philosophy. On the other hand, the requirement for the 0.35 damping indicates that if any ‘serious’ mission-related flying is to be conducted, then some form of artificial stability and control augmentation is mandatory. This is exactly how designs evolve in practice, and typically a significant proportion of the development flying on a new type will be dedicated to the refinement of the stability and control augmentation system, with particular emphasis on longitudinal handling. Figure 6.46 shows how the phugoid mode of the BK117 helicopter at 130 knots was stabilized with a combination of rate and attitude feedback with the relatively low gain values -0.06°/° s and 0.3°/°, with the attitude stabilization providing by far the strongest contribution
(Ref. 6.61).
A pulse input in longitudinal cyclic is usually sufficient to excite the pitch long period oscillation; the period can lie between 10 and 30 s, or even higher, hence the motion will have to be allowed to develop over a long time to obtain good estimates of both damping and frequency. As discussed in Chapter 2, this can lead to large amplitude motions from which the recovery can be even more dramatic than the test manoeuvre itself. The lesson is to apply a small amplitude exciting pulse, and to ensure that the motion does not exceed the normal linear range (e. g., attitude excursions < 10°, speed excursions <10 knots).
6.4.4 Trim and quasi-static stability
A pilot flying under IFR in turbulent conditions will have his or her workload significantly increased if, in attempting to control speed errors with cyclic, the new stick position to trim is in the opposite sense to that initially required to cancel the perturbation. Likewise, when manoeuvring to avoid obstacles, a pilot will need to work harder if having rolled into a turn and pulled back on cyclic to increase turn rate, the pilot finds that he or she needs to push forward to avoid ‘digging-in’. Both of these handling characteristics, are, generally speaking, unacceptable by any military or civil requirements standards, and flight tests need to be performed to establish if they are present within the OFE. They represent negative margins of speed and manoeuvre stability, respectively, that, together with their close companion flight path stability, form the topic of this section. Requirements tend to be very qualitative for trim and static/manoeuvre stability and therefore the emphasis below is on the required flight test techniques.
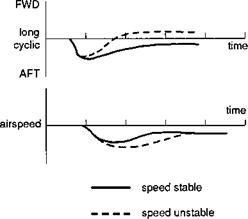
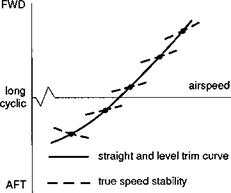
Figure 6.47 illustrates the consequences of positive and negative speed stability for cyclic control — in both cases the speed excursion is the same, but, with negative speed stability, the cyclic retrims the ‘wrong way’. There are two concepts traditionally associated with this characteristic, namely, apparent and true speed stability. The apparent speed stability is determined by the slope of the longitudinal cyclic trim variation with speed, i. e., with collective varying to maintain level flight or a defined rate of climb or descent. True speed stability, on the other hand, usually of more concern to the pilot, is determined at a given speed by noting the new trim stick position for speed increments at constant collective pitch. The two results are sketched in Fig. 6.48 where, for illustration, the true speed stability is shown to be negative and contrary to the apparent speed stability at the lower speed trim condition.
The test technique to investigate true speed stability is fairly straightforward. Having established trimmed flight at a defined airspeed and power setting, the helicopter is retrimmed in a series of speed increments, below and above the test airspeed, with cyclic. Alternation between positive and negative increments allows the aircraft to remain within a sensible altitude band (e. g., 1000 ft) for level flight airspeed tests.
|
Fig. 6.47 Effects of speed stability; impact on cyclic trim (Ref. 6.62) |
|
Fig. 6.48 Effects of speed stability; true and apparent speed stability (Ref. 6.62) |
For climb and descent conditions, two passes through the required altitude band are typically required. While conducting these tests, the pilot will also be concerned with any related ‘ease of trimming’ issues, e. g., controller breakout forces and force gradients. Particular attention will be paid to identifying strong nonlinearities, for example, discontinuities in the speed stability and to distinguishing these from any adverse controller force characteristics or the effects of atmospheric disturbances.
Most certification requirements allow a limited degree of speed instability at low speeds, on the basis that the effect is not so critical here with the pilot normally controlling both speed and flight path angle with a combined cyclic/collective control strategy. At higher speeds, particularly for cold weather operations, adverse speed stability can limit the safe maximum flight speed, and careful testing is required to highlight any advancing blade Mach number effects. One such problem arises when a forward speed increment results in the centre of pressure moving further aft on the outboard sections of the advancing blade. This compressibility effect twists the blade cyclically to give a nose-down pitching moment on the aircraft, which needs to be counteracted with aft cyclic.
Within the framework of the linearized stability theory discussed in Chapter 4, the speed stability of a helicopter is determined by the value of the effective derivative
Zu
M* = Mu – -*Mw (6.24)
Zw
obtained from the equations for the initial pitching moment due to a speed disturbance and the final steady-state cyclic increment. The effect is usually dominated by the pitching moment derivative Mu which has a stabilizing contribution from the main rotor. The fuselage and tailplane contributions will depend upon the trimmed incidence of these components. Tailplane effects can dominate in some situations. Reference 6.63 describes the adverse effect on speed stability caused by tailplane stall during climbing flight in the SA 365N helicopter. Fitting small trailing edge strips on the tailplane attenuated this effect, but to guarantee speed stability for steep climbs in the range 80-100 knots, an additional speed hold function was incorporated into the autopilot. Similar small design modifications to the tailplane leading and trailing edges were required to achieve speed stability for the BK117 helicopter (Ref. 6.61).
In addition to the speed stability testing described above, further tests are required to explore the cyclic trim changes with power settings at different speeds from autorotation to max power climb. These tests are required largely to check that adequate control margins are available in these conditions but will also highlight the essential features of flight path stability. Although there are no general requirements concerned with helicopter flight path stability, for aircraft roles that demand precise flight path control, e. g., guided approaches, testing will need to be carried out to establish the optimum pilot control strategy for the various flight phases. Such tests are likely to be carried out in conjunction with the development of the associated displays and stability augmentation. Collective is, of course, the natural control to counteract flight path errors, but above the minimum power speed the use of cyclic can achieve a similar effect. If the aircraft has, for example, fallen below the glide path and is flying too fast, pulling back on the stick will eventually cancel both errors. Problems arise below minimum power speed where, although the initial effect of pulling back on the stick is to climb the aircraft, the new equilibrium state will be an increased rate of descent. Although normal control strategy should preclude such problems under ‘controlled’ approach conditions, for unguided steep approaches or emergency situations the pilot needs to be aware of the potential problems. At very steep descent angles the problem can be exacerbated by power settling effects (Ref. 6.64) and ultimately the vortex-ring condition (see Section 6.5), where static stability characteristics are overshadowed by dynamic effects.
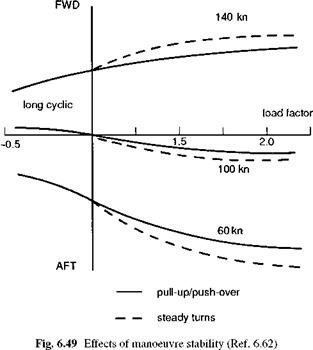
While speed and flight path stability are concerned essentially with cyclic to trim requirements in 1 g flight, manoeuvre stability is related to cyclic changes required in manoeuvres involving a change in normal acceleration, or the stick displacement (or force) per g. All handling requirements specify that this should be positive, i. e., aft stick is required to hold an increased load factor, and as a consequence, there should be no tendency to ‘dig in’ during turning flight. The manoeuvre stability can be determined in flight from either symmetric pull-up and push-over manoeuvres or steady turns, and needs to be measured across the full range of operational conditions, i. e., speeds, atmospheric conditions, aircraft loading. For the pull-up tests, the aircraft is trimmed in level flight at the test airspeed. With collective fixed, the aircraft is then decelerated with cyclic and then dived to accelerate back to the test airspeed. As the test speed is approached, an aft cyclic step is applied to achieve the desired load factor and airspeed as the aircraft passes through a level attitude. The test is repeated with increasing increments of aft cyclic until the maximum permitted load factor is achieved. Similar tests are performed to establish the manoeuvre margin for load factors less than 1, using the push-over technique. For steady turn tests, the aircraft is again trimmed in level flight at the test airspeed. Load factor is applied incrementally by increasing bank angle at constant collective and airspeed, and maintaining balance with pedals. Cyclic is retrimmed at each test condition and the tests conducted for both left and right turns. Rotorspeed should be adjusted only to remain within power-on limits, and since high rates of descent may be achieved, care should be taken to remain within a defined altitude band (e. g., +1000 ft of test condition).
Figure 6.49 illustrates results that may be derived from these tests; the manoeuvre stability is deliberately shown to be negative (and therefore not Level 1) at the higher speed. The cyclic to trim variation with load factor in the steady turn will typically be steeper than the corresponding pull-up result on account of the increased pitch rate in a turn for a given load factor. The relationship between cyclic to trim and pitch
 |
rate or load factor can be derived from linearized theory (see Chapter 4) in the form, neglecting flight path angle effects,
For pull-ups:
Here 01s is the applied cyclic pitch (positive aft), q the pitch rate, V the flight speed and n the load factor. The stability and control derivatives will themselves vary with rotor thrust and rotor disc incidence, and a more exact analysis will certainly be required for higher values of n. Nevertheless, eqns 6.25 and 6.27 are valid representations of manoeuvre stability parameters. The numerator in eqn 6.25 is the classical manoeuvre margin parameter that should be positive for ‘stability’ and acceptable handling characteristics. Typically, an increasingly positive Mw variation with speed will lead to a
deterioration in manoeuvre stability to the point where the margin can change sign. The load factor parameter in the manoeuvre margin for steady turns arises from the inclination of the weight component from the fuselage normal and, at low bank angles, will serve to reduce any undesirable effects of a positive Mw. At higher bank angles, however, any unstable tendencies are likely to re-emerge.
The tests described above to establish the manoeuvre margin are carried out at constant collective pitch settings. In many practical situations, however, the pilot will use collective in conjunction with cyclic to maintain height. The pitching moment generated by collective application will be nose up and hence the cyclic position to trim will be further forward than indicated by the tests at constant collective unless control interlinks have been built in. This effect can be compounded by an increased download on the tail from the main rotor downwash. On other occasions, the pilot may choose to decelerate the aircraft in the turn, hence requiring increased aft cyclic displacement. This variability of stick position with load factor, depending on the type of manoeuvre flown, does not provide the pilot with a reliable tactile cue in manoeuvres. In any case, stick force per g is of more concern to the pilot, particularly in the midhigh speedband, and several current operational helicopters (e. g., AH-64, SH-60) have force feel systems that provide a positive and reliable cue to the pilot of manoeuvre margin.
Before we embark on a discussion of pitch axis flying qualities criteria, it is useful to reflect on the different axis pairings that arise in flying qualities. The conventional approach places roll and yaw together, and pitch and heave together, in classical lateral – directional and longitudinal motions. This is certainly the approach we took in Chapter 4 when analysing flight dynamics in terms of the natural modes. But when it comes to flying qualities criteria, we typically find roll and pitch having much in common. Just as with fixed-wing aircraft, in high-speed flight the pilot has the most powerful control over an aircraft’s flight path with his centre-stick, through ailerons and elevator or lateral and longitudinal cyclic. At hover, and in low-speed flight, the cyclic is used to redirect the helicopter rotor’s thrust, and harmony between roll and pitch flying qualities is particularly important because mixed pilot commands are a regular occurrence. In this context we should expect similar formats for roll and pitch flying qualities criteria. While this is the case in low-speed manoeuvres, the requirements on the pitch axis in forward flight are quite different from roll in many details. Pitch cyclic is the primary speed control, provides the mechanism for pulling g in manoeuvres, enables fuselage pointing and is a powerful motivator for the control of flight path angle in high-speed flight. Pilots of conventional helicopters are familiar with an impure response type in the pitch axis in forward flight rate in the short term, washing off quite rapidly as speed and incidence change, to give an attitude change in the mid term. The longitudinal stick position therefore provides a powerful cue to the pilot of the forward airspeed and pitch attitude of the helicopter. In response-type terms, however, this most closely resembles a rate response type and hence the related criteria apply.
As we examine the criteria for different areas on the response diagram, we shall find many similarities with the roll axis, but we will also see differences, especially in the areas of dynamic and quasi-static stability. Comparison with equivalent criteria for fixed-wing aircraft will provide interesting points for discussion when comparing the different roles and associated task bandwidths associated with the two types of aircraft.
A key flying qualities concern relates to the ability to trim a helicopter with adequate control margins remaining for manoeuvring, throughout the OFE. We have already discussed aspects of control adequacy in the section on control power but this can now be expanded in an examination of the roll axis. Just as with dynamic stability, however, it is difficult to discuss roll motion in isolation. The ease with which a pilot can coordinate entry to a turn, maintain trim in asymmetric flight or point the fuselage away from the direction of flight depends critically upon the ratio of two static stability effects, the yawing moment (Nv) and rolling moment (Lv) due to sideslip, i. e., directional and dihedral stability, respectively. ADS-33 requires the dihedral to be positive and essentially linear for Level 1 flying qualities. To protect against control limits being reached in sideslipping or sideways flight, upper limits on dihedral effects in the required MTEs are defined in terms of amount of control used, as follows:
Level 1: <75% control/49 N (11 lbf) control force;
Level 2: <90% control/60 N (13.5 lbf) control force.
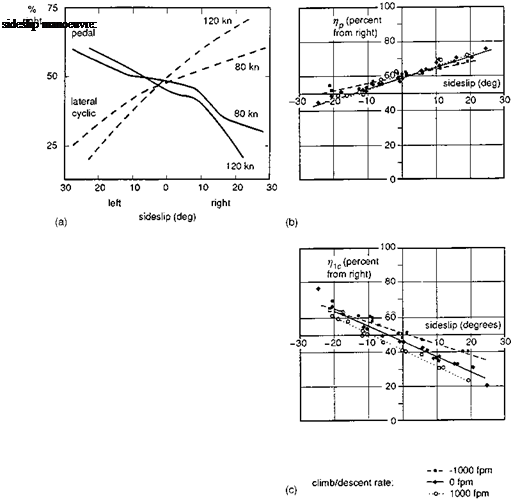
Estimates of both the rolling and the yawing moments can be derived from steady heading sideslip flight tests at a range of forward speeds from climbing through to autorotative flight. Such tests will also highlight any control problems within the sideslip envelope which is usually defined from fuselage stress considerations as a piecewise linear function of airspeed. At each test point, control angles to trim and aircraft attitudes are recorded. Figures 6.38(a)-(c) illustrate trim control results for the Puma; Fig. 6.38(a) illustrates how the control gradients vary with forward speed while Figs 6.38(b) and 6.38(c) show results at three different flight states descent, level and climb at 100 knots, with the slopes of the curves again indicating directional and dihedral stability. The calculation of derivative ratios can be demonstrated using the analysis of Chapter 4. The following ratios can be derived from the steady moment balance in a
![]()
![]()
 |
(Lv L n pNv /Nr/p)
L V1c
8yP Nv
v Nn p where Snic and &np are the pilot’s control deflections from level trim and v is the sideslip velocity. Provided that the variation of the control derivatives with speed can be neglected, the trends, though not absolute variations, in dihedral and directional stability can therefore be derived. For helicopter configurations with a high set tail
rotor, the rolling moment from the tail rotor will contribute significantly to the lateral cyclic required in steady sideslipping flight. When the dihedral effect is small the trimmed cyclic may be in the same direction as the pedal trim, leading to Level 2 qualities according to ADS-33. An overriding pilot consideration when testing for directional and dihedral stability should be that clear unambiguous sideforce cues indicate the direction of sideslip. In particular, the pilot needs to be clearly alerted by these cues when sideslip limits are approached, as normally information on sideslip is not available to the pilot.
Stability is important in any dynamic system, and for helicopters this is reflected in the need for the aircraft to not diverge from its trim condition if the pilot’s controls are left momentarily unattended. The theoretical foundation for dynamic stability has already been covered in detail in Chapter 4, and the reader is referred there for discussions on modes of motion and associated eigenvalues. Stability was discussed in terms of the character of the response to small disturbances and the tendency of the aircraft to return to or depart from equilibrium. One of the problems encountered when discussing stability criteria in separated axes form is that the natural modes of motion are generally coupled and the roll DoF actually appears in most. However, there is often, but not always, a single dominant axis per mode and this appears the most logical manner by which to approach the discussion. With this rationale we discuss the lateral/directional oscillatory mode under the yaw axis stability and the pitch-roll long period oscillation under pitch axis stability, although both have implications on roll stability. The remaining mode for which there are stability concerns is the roll-yaw spiral and we choose to discuss relevant criteria in this section.
The characteristics of the spiral mode will determine the tendency of the aircraft to return to or depart from a level trim condition following a perturbation in roll. Spiral and Dutch roll stability are naturally at variance with one another so that a strongly stable spiral mode will result in an attitude command response type in roll, accompanied by a strong excitation of a weakly stable, or even unstable, roll-sideslip oscillation during simple uncoordinated turns. Criteria relating to the roll-sideslip coupling are discussed in Section 6.7 and, of course, the Dutch roll stability itself in Section 6.5. ADS-33 sets the handling boundaries on the time-to-double amplitude of the roll angle following a pulse input in lateral cyclic; i. e.
Level 1: td > 20 s
Level 2: td > 12 s
Level 3: td > 4 s
The degree of spiral stability can be demonstrated qualitatively by the ‘turns on one control’ technique. Having established a trim condition, lateral cyclic is used to roll the aircraft to a small bank angle. Speed is held constant with longitudinal cyclic and the lateral cyclic retrimmed to hold the new bank angle and turn rate; pedal and collective are held fixed. The manoeuvre is repeated in the opposite direction and for a range of increasing bank angles. Similar tests can be performed using yaw pedals to initiate and trim in the turn. For both tests, the control deflexion required to maintain the steady turn gives a direct indication of the spiral stability. If out-of-turn control is required then the aircraft exhibits spiral instability; conversely, if into-turn control is required then the aircraft is spirally stable. Recalling the linearized derivative theory in Chapter 4 and combining terms in the rolling and yawing equations of motion in a steady turn, the control perturbations can be written as
Here r is the yaw rate in the turn and an additional assumption is made that rolling moments generated by the helicopter’s pitch rate in the turn can be neglected. The numerator in the above equations is the spiral stability parameter derived in Chapter 4. From the test results, only the ratio of this parameter with the control derivatives can be obtained as a function of flight condition, and the inclusion of the rolling moment due to pedal complicates the analysis. The spiral stability test technique recommended by the FAA (Refs 6.10, 6.13) involves establishing an out-of-balance trim, returning controls to the level trim position and measuring the bank angle response. Reference 6.13 states that the time for the bank angle to pass 20° should not be so short as to cause the aircraft to have objectionable flight characteristics in the IFR environment (UCE >1). For unstable aircraft, the time-to-double amplitude should be at least 9 s.
As we examine handling qualities boundaries based on stability for other axes, we shall see that pilots can tolerate some degree of instability in the long period modes of helicopter motion, particularly during attentive flight phases. But before the aircraft even moves, the pilot will be concerned about the ability to establish and maintain trim. We now come to the final area on our response diagram, encompassing trim and classical quasi-static stability.
Control sensitivity is a measure of the initial angular acceleration of the aircraft following a step input command, is traditionally measured in rad/s2 in, and is recognized as a primary parameter affecting pilot opinion of aircraft handling. ADS-33 does not dispute this but says that, ‘all controller sensitivities shall be consistent with the aircraft dynamic response characteristics in each axis at all flight conditions’; no criteria for the acceleration sensitivity are given. This is not difficult to live with for simple first-order-type responses where the control sensitivity is given by the product of the bandwidth and control power. In simple derivative language, the sensitivity would then be related to the control derivative through the control gearing, i. e.,
(01c max)^ вс = —psLp (6.18)
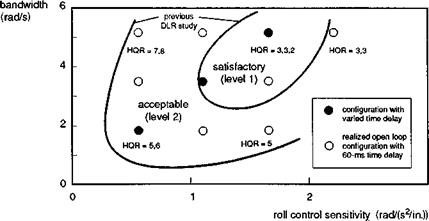
For simple response types, the requirements on sensitivity are therefore defined by those for response characteristics already discussed. The most obvious interpretation of this relationship was given by Edenborough and Wernicke (Ref. 6.53) who first attempted to define requirements for roll control characteristics for combat helicopters. The boundary lines are shown in the earlier Fig. 6.23, with a minimum sensitivity level of 1 rad/(s2 in) and an increasing range of acceptable sensitivities for increasing roll damping. The upper limits on sensitivity reflect the fact that the initial response can be too jerky as well as too sluggish. In Fig. 6.23, the boundaries from a variety of different studies, conducted over the last few decades, illustrate the wide range of sensitivity that appears to be acceptable. In Ref. 6.54, Pausder and Von Grunhagen map quality boundaries onto a similar diagram, based on flight data from the DLR ACT Bo105, replacing roll damping with bandwidth (Fig. 6.37). This would seem to be the most suitable format for relating the short-term response to the sensitivity but, like all the other criteria we have discussed, will almost certainly have different boundary lines for different types of MTEs. Note that the minimum bandwidths for Level 1 and 2 handling qualities do not conform to the ADS-33C boundaries. A second series of in-flight experiments to explore sensitivity boundaries is reported in Ref. 6.55, based on tests with the Canadian ACT Bell 205. The authors of this work argue that a more meaningful measure of sensitivity is the rate sensitivity (measured in °/(s in)), rather than the control sensitivity. Note that on Figs 6.23 and 6.37, the rate sensitivity is constant along radial lines. The results presented in Ref. 6.55 confirm that there is a range of acceptable sensitivities for given bandwidth, but with much sharper
|
Fig. 6.37 Handling qualities boundaries for bandwidth versus control sensitivity (Ref. 6.54) |
degradations for reducing sensitivity than increasing. This may reflect the difference between configurations that are becoming impossible to fly and those that are merely difficult. One thing that seems clear from all studies on sensitivity is that the lower the bandwidth, the narrower the range of acceptable sensitivities. The results in Fig. 6.37 suggest that the Level 1 boundary may be a closed contour, as postulated by Edenbor – ough and Wernicke (Ref. 6.53), reflecting the potential for having an over-responsive aircraft. To date, insufficient attention has been given to this topic to give clear guidance, but there are parallels with fixed-wing flying qualities where very high-performance fighter aircraft do have prescribed upper limits on sensitivity and bandwidth (Ref. 6.6).
But there is another major influence on the quality of control or rate sensitivity – the characteristics of the pilot’s controller or inceptor. Even conventional centre sticks can vary in shape and size and, given the control power requirements, the sensitivity is dependent on the size of the control throw. With the advent of sidestick controllers, the sensitivity requirements have become even more complicated. Early research into sidesticks for helicopters soon established the need for nonlinear shaping of the re- sponse/control deflexion relationship (Refs 6.56-6.58). For small displacement controllers with linear response gradients, pilots find that the sensitivity for small amplitude inputs is too high to allow smooth control actions, and a much reduced gradient near centre is required. To allow a high control power to be achieved at maximum control throw, the gradient will then typically have to increase several-fold with the possibility of too high a sensitivity at larger displacements. There are many flying qualities issues that are accentuated with sidesticks, and we devote more discussion to these in Chapter 7. So we leave sensitivity, a vital influence but still something of a mystery, with very little data to substantiate well-defined quality boundaries. Perhaps it is as well that such a critical parameter is left for the engineer and pilot to optimize in the design phase.
Staying with small amplitude motions we now increase the timescale to discuss a facet of helicopter flying qualities that is perhaps the most notorious, if not the most critical, of all – stability.
Having measured the frequency response of the aircraft to control excitation, the remaining task is to estimate the bandwidth and phase delay from graphical representations of the amplitude and phase of the response as shown in Fig. 6.25. But how do we ensure that the estimated frequency response functions are as accurate as possible or even valid? The frequency response analysis, whereby the time response data are converted into the frequency domain using a Fast Fourier Transform (FFT) technique (Ref. 6.50), assumes that the input-output relationship is approximately linear and that any ‘noise’ on the signals is random and uncorrelated with the response. Both of these assumptions break down to some degree in practice and it is important to process the time histories systematically to calibrate the data quality. The linear FFT converts a sweep time history of, say, roll rate of duration T, into a complex function of frequency (with in-phase and quadrature components) given by the relation
T
![]()
![]() j p(t) e-jwt dt 0
j p(t) e-jwt dt 0
The minimum frequency in the transformed function is related to the time duration of the sweep by the simple function
In practice, with digitized data, the transformation is conducted discretely, over the time response samples pn, measured every At, in the form
n-1
![]()
![]() ____ v— / Kfl
____ v— / Kfl
Pk(®k) = At 2^ pnexp( – j2nn
n=0
The frequency response functions H for all required input-output pairs (e. g., mc, p) can be assembled from the spectral density functions G (Ref. 6.50) as
A measure of accuracy of the derived frequency response function in terms of the linear correlation between output and input is given by the coherence function
Any coherence less than unity signifies the presence of nonlinearities or correlated noise on the response. In close-to-ideal conditions, the computations given by eqns 6.15 and 6.16 will generate frequency response data from which good estimates of bandwidth and phase delay can be derived. In practice, further and more detailed processing is often required to ensure that the handling qualities parameter estimates are the best obtainable. In Ref. 6.51, Tischler and Cauffman discuss the details as implemented in the US Army’s CIPHER analysis software, involving concatenation of multiple sweeps in the time domain and windowing to derive the best estimates of the individual power spectra. A second stage involves the derivation of the conditional frequency responses to take account of the effects of corrective control inputs in secondary axes. The associated partial coherence functions serve as a guide to the accuracy of the results and the linearity of the input-output relationships. The third stage in the data quality improvement ensures that the degrading effects of noise on the data are minimized. Effectively, composite frequency responses are derived from averaging with different data ‘window’ sizes in the frequency domain – small for the high-frequency range and large for the lower frequencies. A rough rule of thumb for data validity is given when the coherence function exceeds 0.8.
The calculation of bandwidth and phase delay follows according to the procedure given in Fig. 6.25. Most of the data improvement process described above is actually aimed at raising the coherence in the critical frequency range between «180 and 2«i80, where the phase delay is computed. An accurate estimate of phase delay is clearly important to define the handling qualities, but measuring the slope from the phase roll-off is not always straightforward. Reference 6.41 describes how the least-squares fit of the phase line had to be restricted to avoid being distorted by a high-frequency phase drop due to a rotor structural mode.
Bandwidth andphase delay have emerged as two key parameters reflecting attitude handling qualities in the small amplitude regime. The supporting test and analysis methodologies have received considerable attention since the initial debate on the merits of time and frequency domain methods, and the extensive, and more general, coverage given to the topic in this roll control section reflects the level of effort and importance given to the bandwidth concept by the rotorcraft community.
Table 6.3 gives the roll axis bandwidth and phase delay estimates for a number of current operational helicopters in hover, together with the relevant data sources.
In the characterization of helicopter response portrayed by the framework diagram, Fig. 6.5, there is no reference to a handling quality that enjoyed centre stage prior to the publication of ADS-33 – the control sensitivity, and before leaving
|
Table 6.3 Roll attitude bandwidth results for current helicopters
|
small amplitude dynamics, it is important to discuss the apparent demise of this parameter.