Our heavyweight helicopter equal in the world does not have
In Rostov started production of the most load-lifting rotary-wing car The Russian holding «Helicopt[...]

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.

Everything about aircrafts and helicopters. News and events in aviation worldwide. Civil, transportation, military helicopters and airplanes.




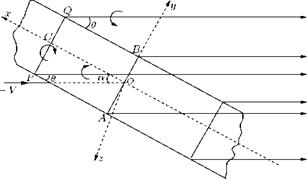
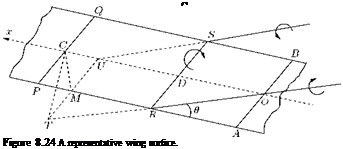
The one-dimensional analysis given in Section 9.3 is valid only for flow through infinitesimal streamtubes. In many real flow situations, the assumption of one-dimensionality for the entire flow is at best an approximation. In problems like flow in ducts, the one-dimensional treatment is adequate. However, in many other practical cases, the one-dimensional methods are neither adequate nor do they provide information about the important aspects of the flow. For example, in the case of flow past the wings of an aircraft, flow through the blade passages of turbine and compressors, and flow through ducts of rapidly varying cross-sectional area, the flow field must be thought of as two-dimensional or three-dimensional in order to obtain results of practical interest.
Because of the mathematical complexities associated with the treatment of the most general case of three-dimensional motion – including shocks, friction and heat transfer, it becomes necessary to conceive simple models of flow, which lend themselves to analytical treatment but at the same time furnish valuable information concerning the real and difficult flow patterns. We know that by using Prandtl’s boundary
layer concept, it is possible to neglect friction and heat transfer for the region of potential flow outside the boundary layer.
In this chapter, we discuss the differential equations of motion for irrotational, inviscid, adiabatic and shock-free motion of a perfect gas.
Consider a reservoir as shown in Figure 9.2, containing air at high pressure p0. Let the density, temperature, speed of sound and velocity of air be p0, 70, a0 and V0, respectively.
Because of the large volume of the reservoir, the velocity of air inside is V0 = 0. Let the high pressure air be discharged to ambient atmosphere at pressure pa and velocity V = 0, through an opening as shown in Figure 9.2. Now the velocity V at the opening, with which the air is discharged, can be obtained by substituting V1 = 0, p1 = p0, P1 = P0 and p2 = pa into Equation (9.19) as:
|
V |
|
(9.21) |
|
Figure 9.2 Discharge of high pressure air through a small opening. |
For discharge into vacuum, that is, if pa = 0, Equation (9.21) results in the maximum velocity:
Vmax is the limiting velocity that may be achieved by expanding a gas at any given stagnation condition into vacuum. For air at TO = 288 K, Vmax = 760.7 m/s = 2.236 a0. This is the maximum velocity that can be obtained by discharge into vacuum in a frictionless flow. From Equation (9.22), we can see that Vmax is independent of reservoir pressure but it depends only on the reservoir temperature. For incompressible flow, by Bernoulli’s equation:
Therefore:
In this relation p is replaced by p0, because p is constant for incompressible flow. Combining Equations (9.22) and (9.23a), we get:
For air, with y = 1.4:
Vmax (comp.) ^ 1.9 Fmax (incomp.).
That is, the error involved in treating air as an incompressible medium is 90%.
 |
||||
For the case when the flow is not into vacuum, pa/p0 = 0 and Equations (9.21) and (9.23) may be expressed by dividing them by a0 as:
In the course of discussion in this section, we came across three speeds namely, Vmax, a0 and V* (= a*) repeatedly. These three speeds serve as standard reference speeds for gas dynamic study. We know that for adiabatic flow of a perfect gas, the velocity can be expressed as:
v = ^2cp (T0 – t) = yY-IRTw),
where T0 is the stagnation temperature. Since negative temperatures on absolute scales are not attainable, it is evident from the above equation that there is a maximum velocity corresponding to a given stagnation temperature. This maximum velocity, which is often used for reference purpose, is given by:
Another useful reference velocity is the speed of sound at the stagnation temperature, given by:
ao = J yRT0-
Yet another convenient reference velocity is the critical speed V*, that is, velocity at Mach Number unity, or:
V* = a*.
This may also be written as:
R(T0 – T*) = у/ЇВТ*.
Y – 1
This results in:
T * _ 2
To Y + 1
Therefore, in terms of stagnation temperature, the critical speed becomes:
From this equation, we may get the following relations between the three reference velocities (with
Y = 1.4):
The fundamental equations for isentropic flows can be derived by considering a simplified model of a one-dimensional flow field, as follows.
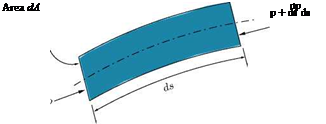
Consider a streamtube differential in equilibrium in a one-dimensional flow field, as represented by the shaded area in Figure 9.1. p is the pressure acting at the left face of the streamtube and (p + ||ds) is the pressure at the right face. Therefore, the pressure force in positive s-direction, Fp, is given by:
dp dp
Fp = p dA — p + ds dA = — ds dA.
ds ds
For equilibrium, dm (dV/dt) = sum of all the forces acting on the streamtube differential, where dm is the mass of fluid in the streamtube element considered, and dV/dt is the substantial acceleration.
|
dV |
dV |
|
|
dV = |
dt + |
ds |
|
dt |
ds |
|
|
dV |
dV dt |
dV ds |
|
— = |
— — + |
— — |
|
dt |
dt dt |
ds dt |
In the above equation for substantial acceleration, dV/dt is the local acceleration or acceleration at a point,
dV ds dV
that is, change of velocity at a fixed point in space with time. The convective acceleration——– = V —
ds dt ds
is the acceleration between two points in space, that is, change of velocity at a fixed time with space. It is present even in a steady flow.
The substantial derivative is expressed as:
![]() dV dV dV
dV dV dV
= + V.
dt dt ds
Therefore, the equilibrium equation becomes:
dp dV
 |
— ds dA = dm. ds dt
But dm = p dA ds. Substituting this into the above equation, we get:
dV _ 1 dp
dt p ds
that is:
Equation (9.13) is applicable for both compressible and incompressible flows; the only difference comes in solution. For steady flow, Equation (9.13) becomes:
![]() dV 1 dp
dV 1 dp
V— + – — = 0.
ds p ds
Integration of Equation (9.14) yields:
 (9.15)
(9.15)
This equation is often called the compressible form of Bernoulli’s equation for inviscid flows. If p is expressible as a function of p only, that is, p = p(p), the second expression is integrable. Fluids having these characteristics, namely the density is a function of pressure only, are called barotropic fluids. For isentropic flow process:
|
p _ |
constant |
(9.16) |
|
pY = |
/ 1/Y |
|
|
p2 _ I |
El |
(9.17) |
|
p1 ‘ |
kpJ ’ |
where subscripts 1 and 2 refer to two different states. Therefore, integrating dp/p between pressure limits p1 and p2 , we get:
Using Equation (9.18), Bernoulli’s equation can be written as:
Equation (9.19) is a form of energy equation for isentropic flow process of gases.
For an adiabatic flow of perfect gases, the energy equation can be written as:
![]()
|
|
|
y P2 v[ = y pi
![]() Y – 1 P2 2 y – 1 Pi 2
Y – 1 P2 2 y – 1 Pi 2
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|

 ~S
~S